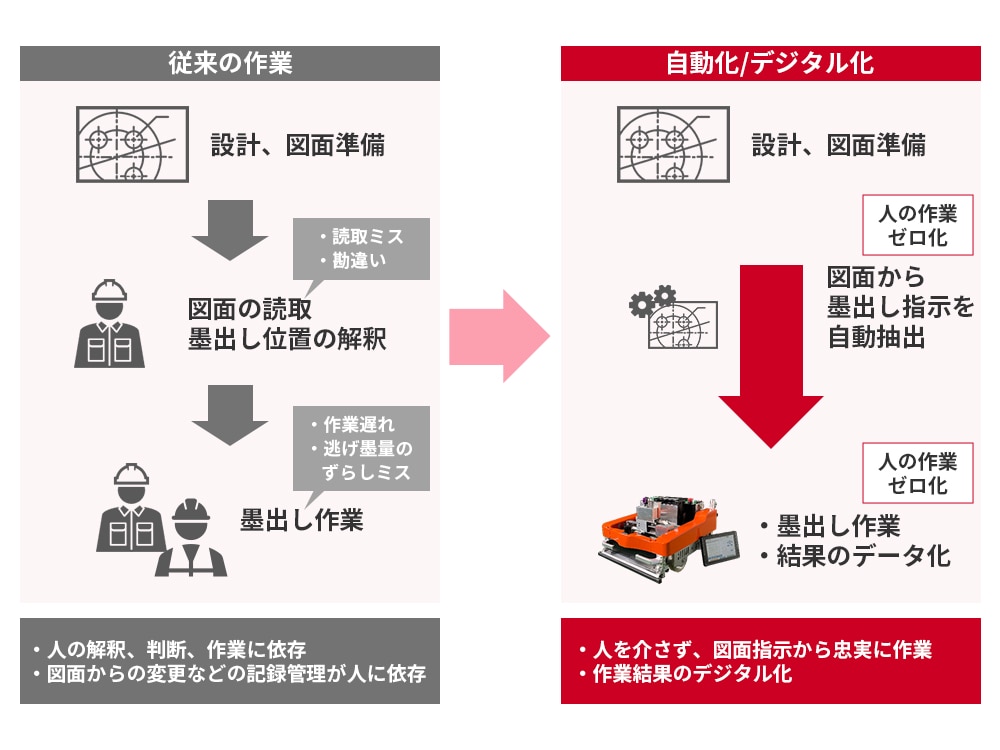
墨出し作業の自動化に必要な環境を
ワンストップでご提供
必要な準備は、CAD図面と現場のセッティング。あとは、ロボットにお任せください。
運用イメージ
墨出しロボット[SumiROBO]
を使った墨出しのやり方
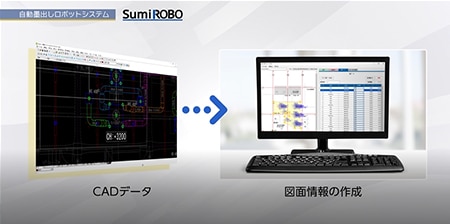
STEP01
墨出しデータの準備
クラウドサービスでCADデータからロボットへの指示データを作成し、タブレットのコントロールアプリに登録します。CADデータは記述ルールに従い、通り芯と墨出し位置をプロットいただきます。

STEP02
測量機のセッティング
通り芯が広く見通せる場所に測量機を設置し、電源を入れます。測量機とプリズムを使い、タブレット指示に従って墨出し作業の基準となる通し芯を計測し登録します。測量機の位置は、任意の場所に設置後にシステム操作で認識するので、設置に精度や専門的な知識は不要です。
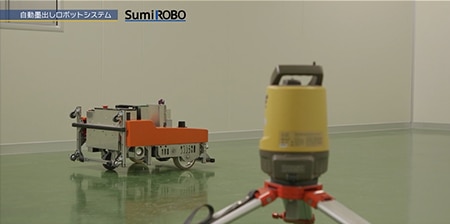
STEP03
墨出し作業の開始
墨出しボタンを押すと測量機がロボットに搭載されたプリズムを自動でサーチし、補測が完了するとロボットが動き出し自動墨出しが開始されます。障害物と判断すれば自動でスキップするなど、作業の継続をロボット自ら判断します。
STEP04
墨出し結果の確認
墨出し結果の適切さを確認する目的で、タブレット操作で測量機と連動した確認計測を実施します。作業開始付近の墨出し点と作業終了付近の墨出し点の確認作業を行うことで、その間に実施したすべての墨出し作業が問題なく実施できた事を確認できます。
墨出しロボット[SumiROBO]操作説明動画

墨出しロボット[SumiROBO]の導入をご検討中で、[SumiROBO]を使った墨出しのやり方や一連の手順をもっと詳しくご確認したい方は、専用の動画をご用意しておりますので、以下の「動画視聴のお申し込み」ボタンからお申し込みください。お申し込み完了後、動画をご視聴いただけます。
サービスメニュー


© Hitachi Channel Solutions, Corp. 2004, 2022. All Rights Reserved.