連続作業や高精度、
現場の移動やセッティングのしやすさを実現
連続作業や高精度、現場の移動や
セッティングのしやすさを実現
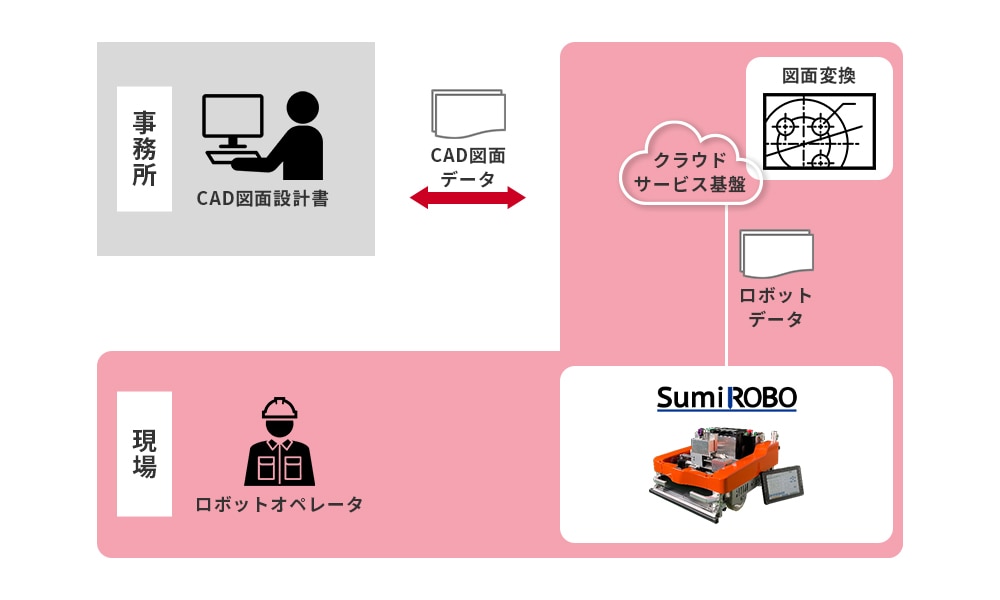
[SumiROBO]はCADデータで指示された位置に移動し、床面への印字により正確な位置出しを繰り返すロボットです。
使い慣れたCADソフトを使って、ロボットへの指示が行えます。
サービス基盤でロボットデータに変換し、そのデータをロボットに投入すれば事前準備は完了です。
使い慣れたCADソフトを使って、ロボットへの指示が行えます。
サービス基盤でロボットデータに変換し、そのデータをロボットに投入すれば事前準備は完了です。
[SumiROBO]はCADデータで指示された位置に移動し、床面への印字により正確な位置出しを繰り返すロボットです。使い慣れたCADソフトを使って、ロボットへの指示が行えます。サービス基盤でロボットデータに変換し、そのデータをロボットに投入すれば事前準備は完了です。
システム構成イメージ
墨出しロボット[SumiROBO]
機能紹介
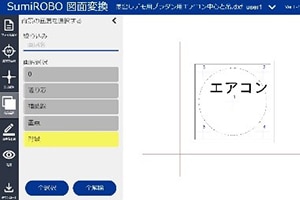
図面変換
CAD図面からロボットの動作データを作成するクラウドサービスです。通り芯・墨出し位置をCADで作図すれば、クラウドでロボット用の指示データを作成できます。操作も画面の指示に従った選択を行うだけで簡単です。
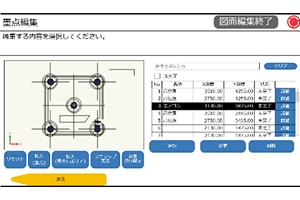
図面編集
位置出しする位置や内容についてタブレットで一覧表示を行い、各点の編集が行えます。そのほか、当日の現場状況から、走行範囲・走行禁止範囲をタップ操作で簡単に指定ができます。
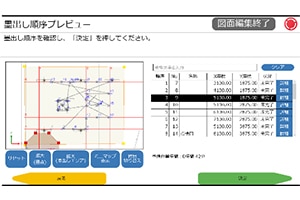
墨出し順序編集
墨出し順序は、[SumiROBO]に自動作成させることができます。また、リスト順を指定し、好きな順番で実施することも可能です。図面編集で設定した走行範囲や走行禁止範囲を自動判断し、作業優先順などの意思を簡単に反映できます。

作業検証(確認計測)
プリズム位置を計測する機能を使用し、データ上の通り芯・既知点・墨点に対して、実際のプリズム位置との差異を把握できます。この機能で、設定時の操作ミスなどを作業開始前に確認でき、墨出し作業後の結果確認にも有効です。

器械点設定(測量機位置設定)
測量機を任意に設置し、設置位置をシステムで特定する機能です。測量機の仕組みの理解や難しい操作は不要で、画面の指示に従って台座に乗せたプリズム位置を数点計測する簡単操作です。大別して、基準芯計測方式と既知点計測方式に対応しています。
墨出しロボット[SumiROBO]
概略仕様
| 大きさ | 約全長720×幅550×高さ420(mm) |
ロボットのサイズ (ハンドル、キャスター、プリズムの突起物含む) |
|---|---|---|
| 質量 | 約25kg(バッテリーを除く) | - |
| 稼働時間 | 約5時間(目安) | 走行距離、印字点数により変動します |
| 状態表示 | 運転状態および異常状態をランプ表示 | 詳細状況はタブレットにて確認可能 |
| 走行能力 |
走行速度:360mm/秒 旋回速度:36°/秒 段差乗越え:20mm以下 登板走行:7°以下 |
路面状態・段差の形状などの環境によって は、性能を満足しない場合があります |
| 印字サイズ | φ120mm | - |
| 印字位置精度 | ±0.6mm以内 |
左記に測量機の誤差(測距精度)が加わり 墨出位置情報になります |
| 測量機 | トプコン製杭ナビ(LN-100,LN-150) | 測距精度±3mm/測角精度5" |
※記載の仕様は、製品の改良などのため予告なく変更することがあります
サービスメニュー


© Hitachi Channel Solutions, Corp. 2004, 2022. All Rights Reserved.